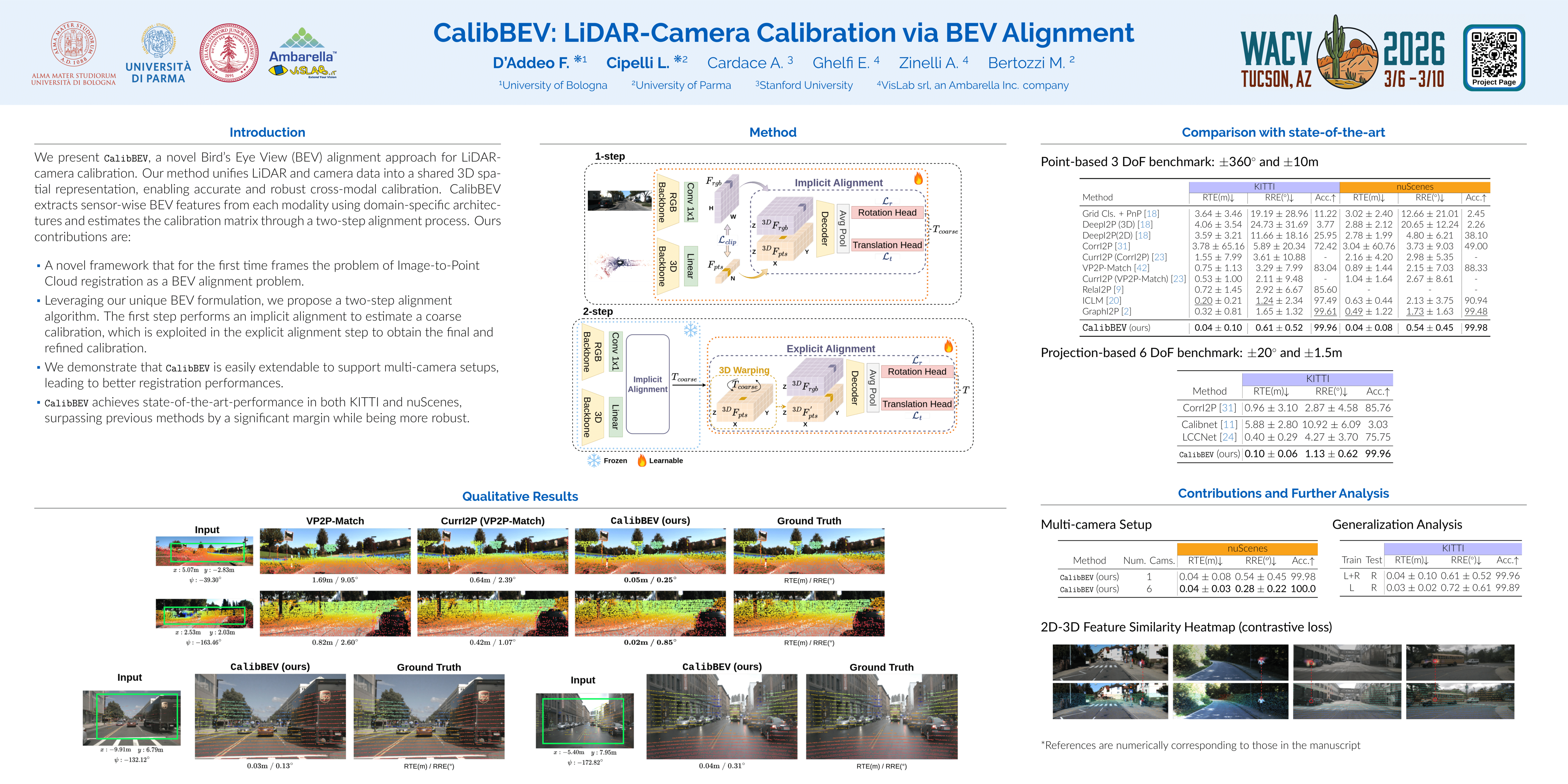
CalibBEV: LiDAR-Camera Calibration via BEV Alignment
Filippo D'Addeo ⋅ Lorenzo Cipelli ⋅ Adriano Cardace ⋅ Emanuele Ghelfi ⋅ Andrea Zinelli ⋅ Massimo Bertozzi
{kind=link}
Abstract
We present $\textbf{CalibBEV}$, a novel Bird's Eye View (BEV) alignment approach for LiDAR-camera calibration. Our method unifies LiDAR and camera data into a shared 3D spatial representation, enabling accurate and robust cross-modal calibration.CalibBEV extracts sensor-wise BEV features from each modality using domain-specific architectures and estimates the calibration matrix through a two-step alignment process. First, we perform an implicit alignment by regressing a coarse calibration matrix directly from the BEV features. To ease this alignment, we enforce semantic consistency between BEV representations across modalities using a contrastive loss inspired by CLIP, guiding both networks toward a unified feature space.In the second step, we leverage our BEV formulation to explicitly align the features of one modality with the other, refining the initial coarse estimate into a final, more accurate calibration matrix.CalibBEV significantly outperforms prior point-to-pixel matching methods, achieving state-of-the-art calibration accuracy. On the KITTI and nuScenes benchmarks, our method reduces the Relative Rotation Error (RRE) by 51% and 68%, and the Relative Translation Error (RTE) by 80% and 91%, respectively, compared to previous methods.
Chat is not available.
Successful Page Load