FlowCLAS: Enhancing Normalizing Flow-Based Anomaly Segmentation Via Contrastive Learning
{kind=link}
Abstract
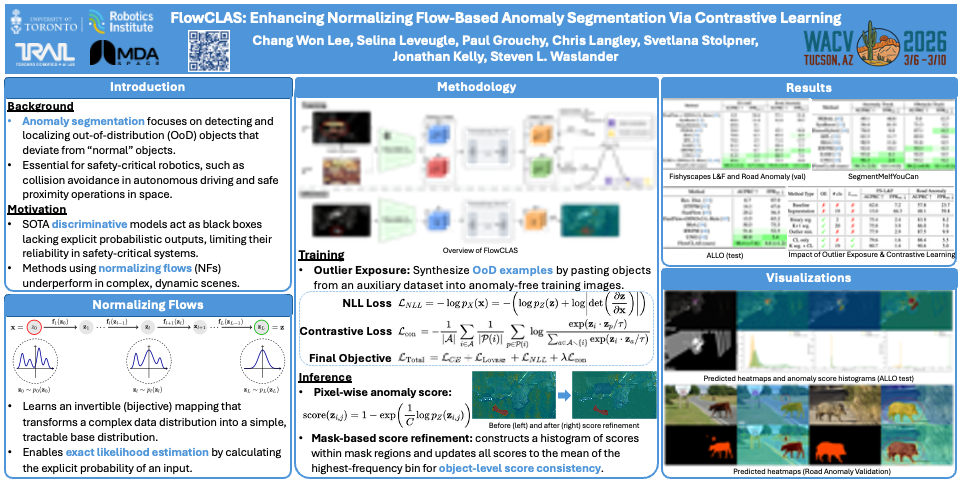
Anomaly segmentation is a critical capability for safety-critical robotics applications that must be aware of unexpected events. Normalizing flows (NFs), a class of generative models, are a promising approach for this task due to their ability to model the inlier data distribution efficiently. However, their performance falters in dynamic scenes, where complex, multi-modal data distributions cause them to struggle with out-of-distribution samples, leaving a performance gap to leading discriminative methods.To address this limitation, we introduce FlowCLAS, a hybrid framework that enhances the traditional maximum likelihood objective of NFs with a discriminative, contrastive loss. Leveraging Outlier Exposure, this objective explicitly enforces a separation between normal and anomalous features in the latent space, retaining the probabilistic foundation of NFs while embedding the discriminative power they lack.The strength of this approach is demonstrated by FlowCLAS establishing new state-of-the-art (SOTA) performance across multiple challenging anomaly segmentation benchmarks for robotics, including Fishyscapes Lost & Found, Road Anomaly, SegmentMeIfYouCan-ObstacleTrack, and ALLO. Our experiments also show that this contrastive approach is more effective than other outlier-based training strategies for NFs, successfully bridging the performance gap to leading discriminative methods.