Intraoperative 2D/3D Registration via Spherical Similarity Learning and Differentiable Levenberg-Marquardt Optimization
{kind=link}
Abstract
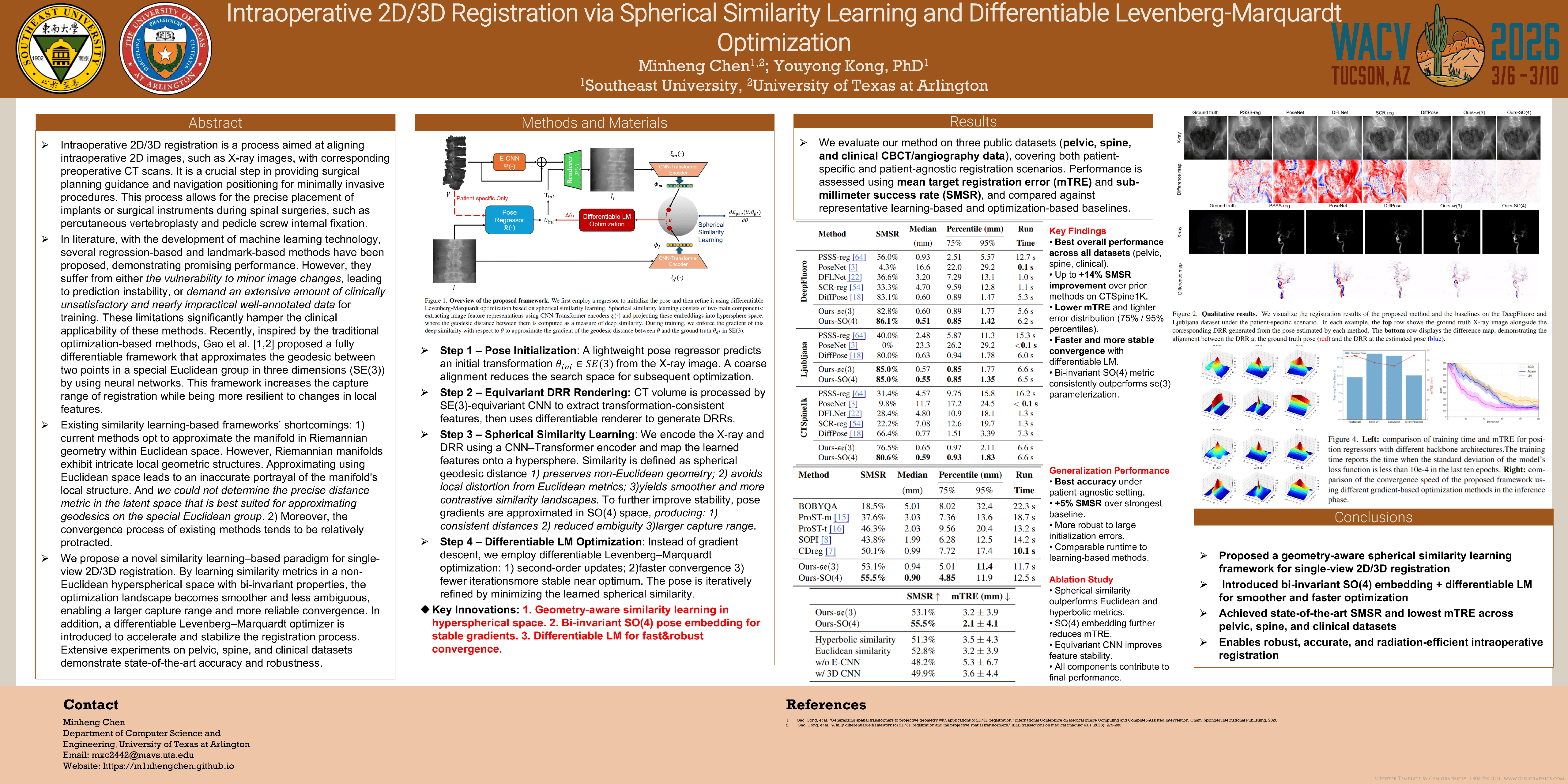
Intraoperative 2D/3D registration aligns preoperative 3D volumes with real-time 2D radiographs, enabling accurate overlay of additional auxiliary anatomical information that is not visible in intraoperative imaging onto the surgical scene. This provides precise localization of instruments and implants, enhancing surgical accuracy and safety.A recently proposed fully differentiable similarity learning framework, which enables neural networks to approximate the geodesic distance between two poses on the manifold in SE(3), has garnered considerable attention. It greatly increases the capture range of registration and mitigates the effects of substantial disturbances on registration. However, existing methods approximate manifold in Riemannian geometry within Euclidean space, leading to inaccurate portrayal of manifold's local structure, with a lengthy convergence process. To address the above limitations, we explore similarity learning on non-Euclidean spherical feature spaces to improve the ability to capture and fit complex manifold features.We extract feature embeddings using a CNN-Transformer encoder, project them into spherical space, and approximate their geodesic distances with Riemannian geodesic distances in the bi-invariant SO(4) space. This enables the learning of a more expressive and geometrically consistent deep similarity metric, enhancing the network’s ability to distinguish subtle pose differences.Fully differentiable Levenberg-Marquardt optimization is adopted to replace the existing gradient descent method to accelerate the convergence of the search during inference phase.Extensive experiments and ablation studies on real and synthetic datasets demonstrate that our approach achieves superior registration accuracy in both patient-specific and patient-agnostic scenarios.