IPCD: Intrinsic Point-Cloud Decomposition
{kind=link}
Abstract
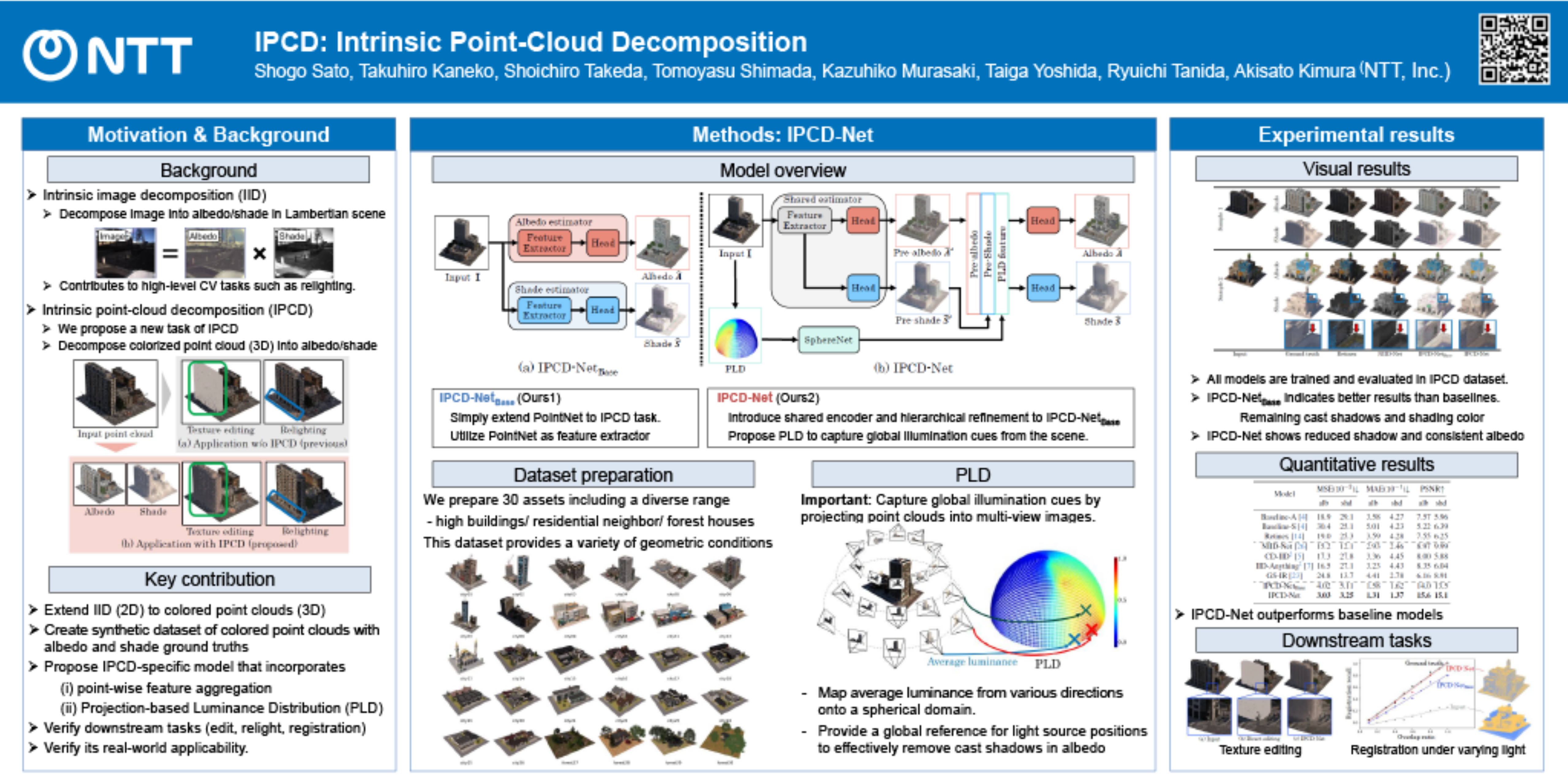
Point clouds are widely used in various fields, including augmented reality (AR) and robotics, where relighting and texture editing are crucial for realistic visualization. Achieving these tasks requires accurately separating albedo from shade. However, performing this separation on point clouds presents two key challenges: (1) the non-grid structure of point clouds makes conventional image-based decomposition models ineffective, and (2) point-cloud models designed for other tasks do not explicitly consider global-light direction, resulting in inaccurate shade. In this paper, we introduce Intrinsic Point-Cloud Decomposition (IPCD), a new task that decomposes colored point clouds into albedo and shade. To overcome challenge (1), we propose IPCD-Net, a novel model that extends image-based decomposition with point-wise feature aggregation for non-grid data processing. For challenge (2), we introduce Projection-based Luminance Distribution (PLD), capturing global-light feature via multi-view projection. For comprehensive evaluation, we create a synthetic outdoor-scene dataset. Experimental results demonstrate that IPCD-Net reduces cast shadows in albedo and enhances color accuracy in shade. Furthermore, we showcase its applications in texture editing, relighting, and point-cloud registration under varying illumination. Finally, we verify the real-world applicability of IPCD-Net.