TacticalCalib: End-to-End 6-DoF Camera Pose Regression for Tactical Camera Calibration
{kind=link}
Abstract
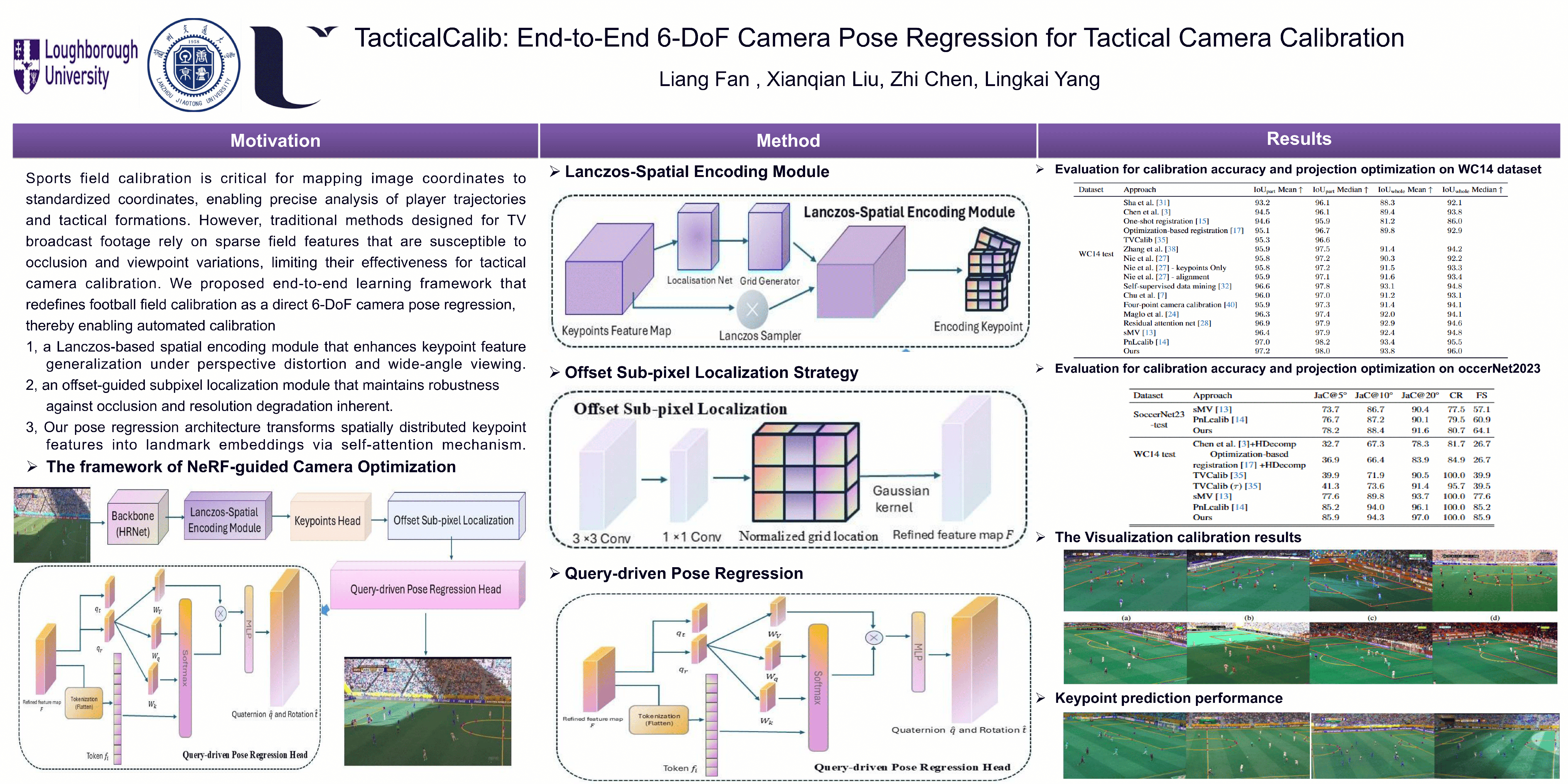
Sports field calibration is critical for mapping image coordinates to standardized coordinates, enabling precise analysis of player trajectories and tactical formations. However, traditional methods designed for TV broadcast footage rely on sparse field features (corners, lines) that are susceptible to occlusion and viewpoint variations, limiting their effectiveness for tactical camera calibration. To address these limitations, we propose a novel pose-based calibration framework that directly regresses the 6-DoF camera pose from tactical view images. The proposed framework consists of three novel components: (1) a Lanczos-based spatial encoding module that preserves fine-grained geometric structures in the field representation, (2) an offset-based subpixel localization strategy that enhances occlusion robustness by refining keypoints' position to sub-pixel accuracy, and (3) a query-driven pose regression head with self-attention mechanisms that directly estimates camera pose without requiring additional calibration metadata. Extensive experiments on the SoccerNet-2023 and World Cup 2014 benchmarks demonstrate that our method achieves state-of-the-art performance in terms of Jaccard Index at threshold t = 5 (JaC@t), establishing superior accuracy and cross-dataset generalization capabilities.