AirLock+: Scaling UAV-to-Satellite Image Registration for Target Geolocalization and Geospatial Augmented Reality
{kind=link}
Abstract
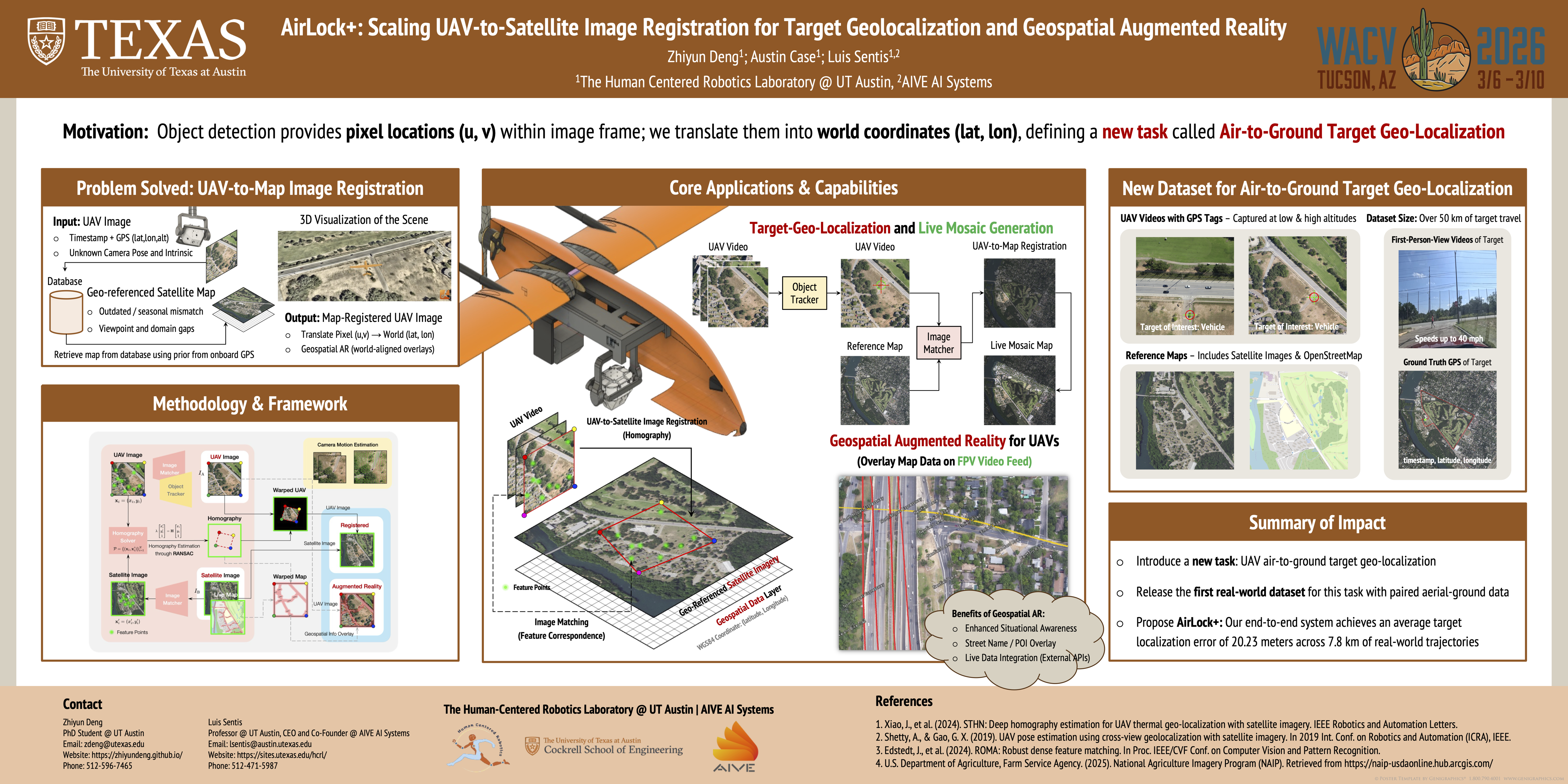
This paper introduces AirLock+, an end-to-end vision system for scalable UAV-to-satellite image registration, enabling two key downstream tasks: (i) precise target geolocalization in geodetic coordinates and (ii) geospatial augmented reality to elevate situation awareness.AirLock+ comprises three modules: A predictive tracker first localizes targets in UAV image frames, while a cross-view image matcher generates robust UAV-to-satellite homographies that withstand severe domain gaps, outdated satellite imagery, and generalize to unseen environments without finetuning. The resulting pixel-to-world correspondences enable target pixel coordinates to be mapped into geodetic space, yielding continuous trajectory estimates and supporting geospatial augmentation of UAV video feeds. Our system achieves an average target localization error of 20.23 m across 7.8 km real-world trajectories, demonstrating robustness in high-altitude, oblique-view conditions where existing methods typically fail. AirLock+ addresses the operational demands of search-and-rescue missions and is actively deployed in the semifinal stage of a global wildfire response competition (competition name omitted for double-blind review).