A Deep Network for Object Detection on Inland Waters
{kind=link}
Abstract
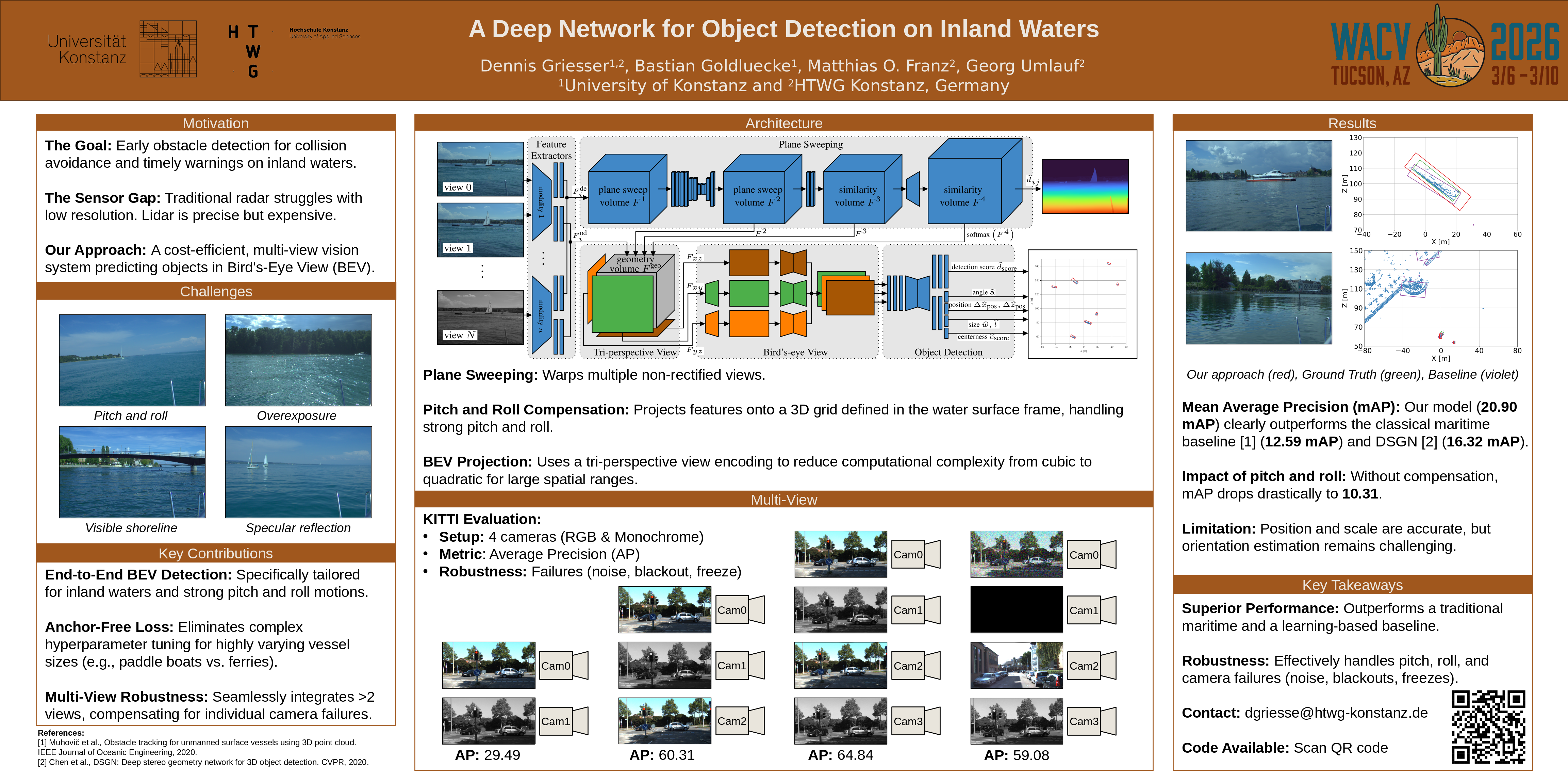
Collisions on inland waters frequently occur due to the absence of clearly defined navigation guidance. To prevent such accidents, optical sensors such as stereo cameras can be employed to detect obstacles at an early stage, enabling timely warnings to vessel operators or the planning of collision avoidance trajectories. In this context, the paper presents a neural network for object detection on inland waters, designed to address the specific challenges of waterborne vehicles, including strong ego-motion and contextual cues like the shoreline appearing in the background. The proposed network leverages a plane sweep approach to integrate multiple views of a scene and predict object locations in bird’s-eye view (BEV) coordinates. Its ability to incorporate more than two camera perspectives is demonstrated using the KITTI dataset. On real-world inland water data, object detection performance is evaluated against a traditional maritime stereo-based method, showing improved mean average precision.