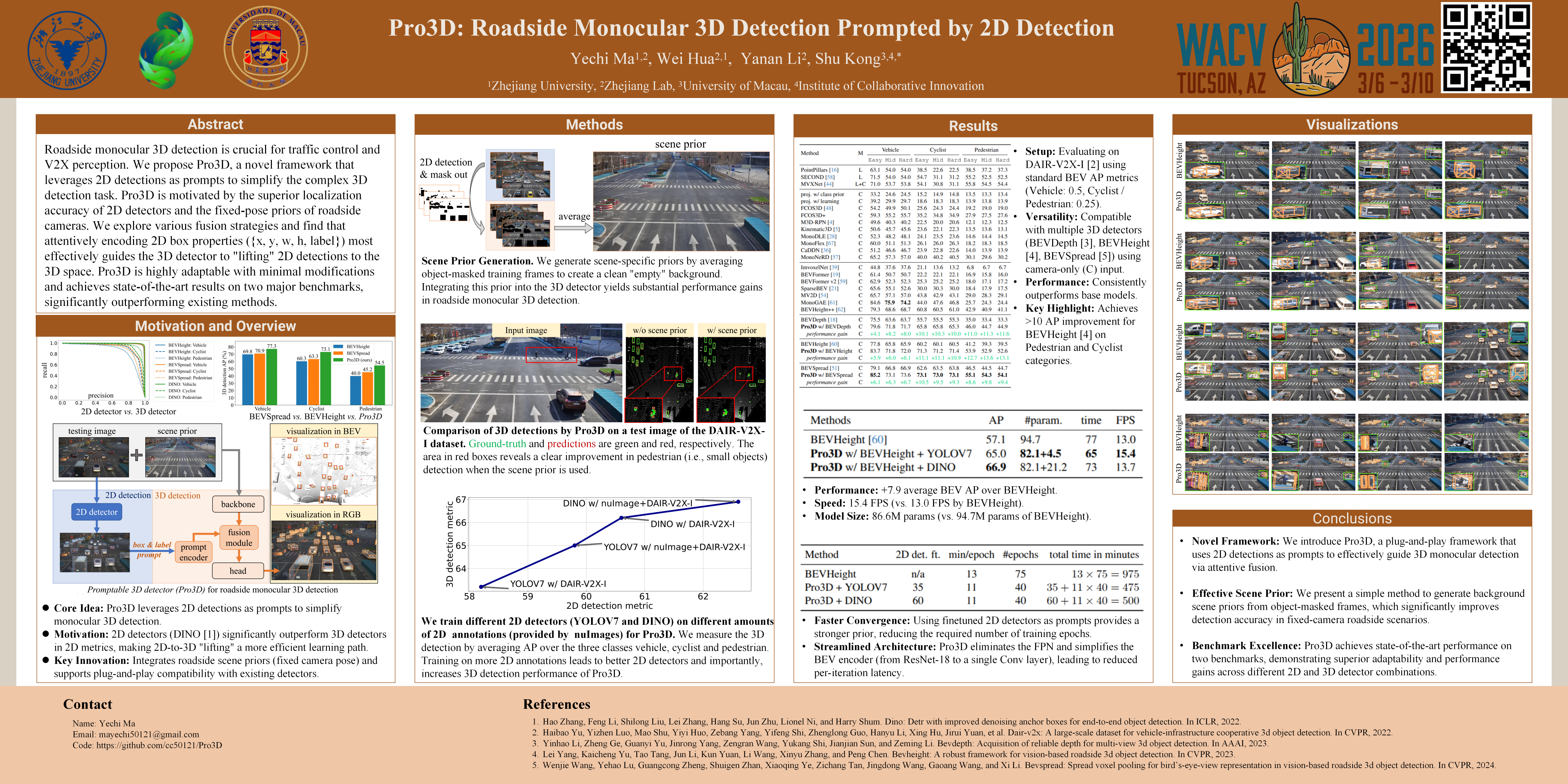
Roadside Monocular 3D Detection Prompted by 2D Detection
Yechi Ma ⋅ Wei Hua ⋅ Yanan Li ⋅ Shu Kong
{kind=link}
Abstract
Roadside monocular 3D detection requires detecting objects of predefined classes in an RGB frame and predicting their 3D attributes, such as bird's-eye-view (BEV) locations. It has broad applications in traffic control, vehicle-vehicle communication, and vehicle-infrastructure cooperative perception. To address this task, we introduce Promptable 3D Detector (Pro3D), a novel detector design that leverages 2D detections as prompts. We build our Pro3D upon two key insights. First, compared to a typical 3D detector, a 2D detector is ``easier'' to train due to fewer loss terms and performs significantly better at localizing objects w.r.t 2D metrics. Second, once 2D detections precisely locate objects in the image, a 3D detector can focus on lifting these detections into 3D BEV, especially when fixed camera pose or scene geometry provide an informative prior. To encode and incorporate 2D detections, we explore three methods: (a) concatenating features from both 2D and 3D detectors, (b) attentively fusing 2D and 3D detector features, and (c) encoding properties of predicted 2D bounding boxes \{$x$, $y$, width, height, label\} and attentively fusing them with the 3D detector feature. Interestingly, the third method significantly outperforms the others, underscoring the effectiveness of 2D detections as prompts that offer precise object targets and allow the 3D detector to focus on lifting them into 3D. Pro3D is adaptable for use with a wide range of 2D and 3D detectors with minimal modifications. Comprehensive experiments demonstrate that our Pro3D significantly enhances existing methods, achieving state-of-the-art results on two contemporary benchmarks.
Chat is not available.
Successful Page Load