WiSAR3D - Aerial LiDAR dataset for 3D object detection
Oren Shrout ⋅ Ori Nizan ⋅ Yizhak Ben-Shabat ⋅ Ayellet Tal
{kind=link}
Abstract
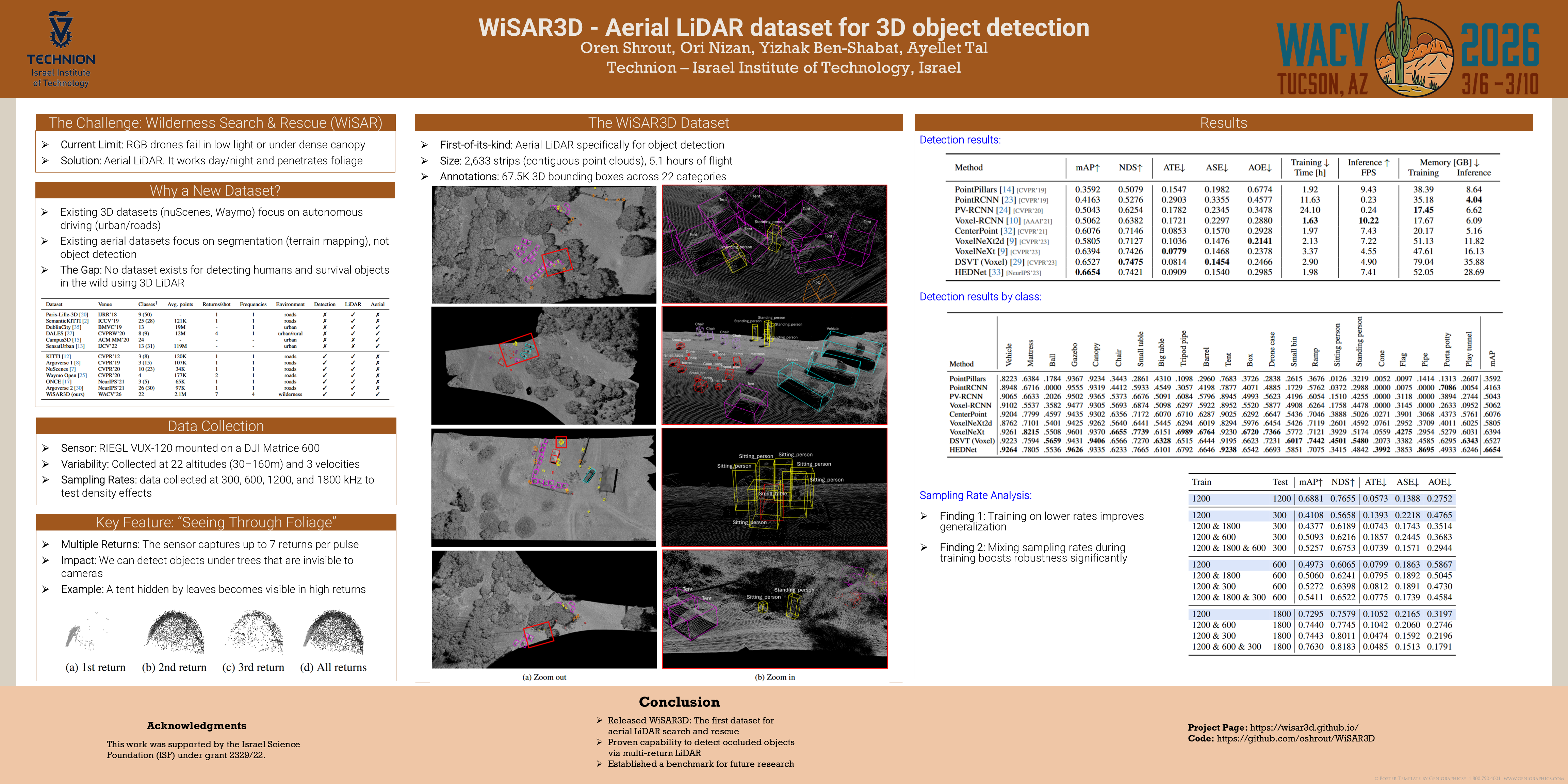
Wilderness Search and Rescue (WiSAR) operations aim to locate and rescue individuals in remote, rugged environments. We introduce \textit{WiSAR3D}, the first aerial LiDAR 3D dataset specifically tailored for 3D object detection in rural scenes. \textit{WiSAR3D} comprises $2633$ strips---contiguous point clouds collected along the flight path, all fully annotated with $67.5K$ 3D bounding boxes for $22$ categories. As the data is captured with multiple returns (echoes), it enables detection under foliage, which is impossible with RGB cameras. Additionally, as this is the first-of-its-kind dataset, we provide benchmark evaluations for state-of-the-art methods developed for autonomous cars on our aerial dataset. The results suggest that specialized models are needed in this domain, as finding individuals remains challenging for current 3D detectors. Some examples can be found at \href{https://wisar3d.github.io/}{https://wisar3d.github.io/}. The full dataset and code will be released upon acceptance.
Chat is not available.
Successful Page Load