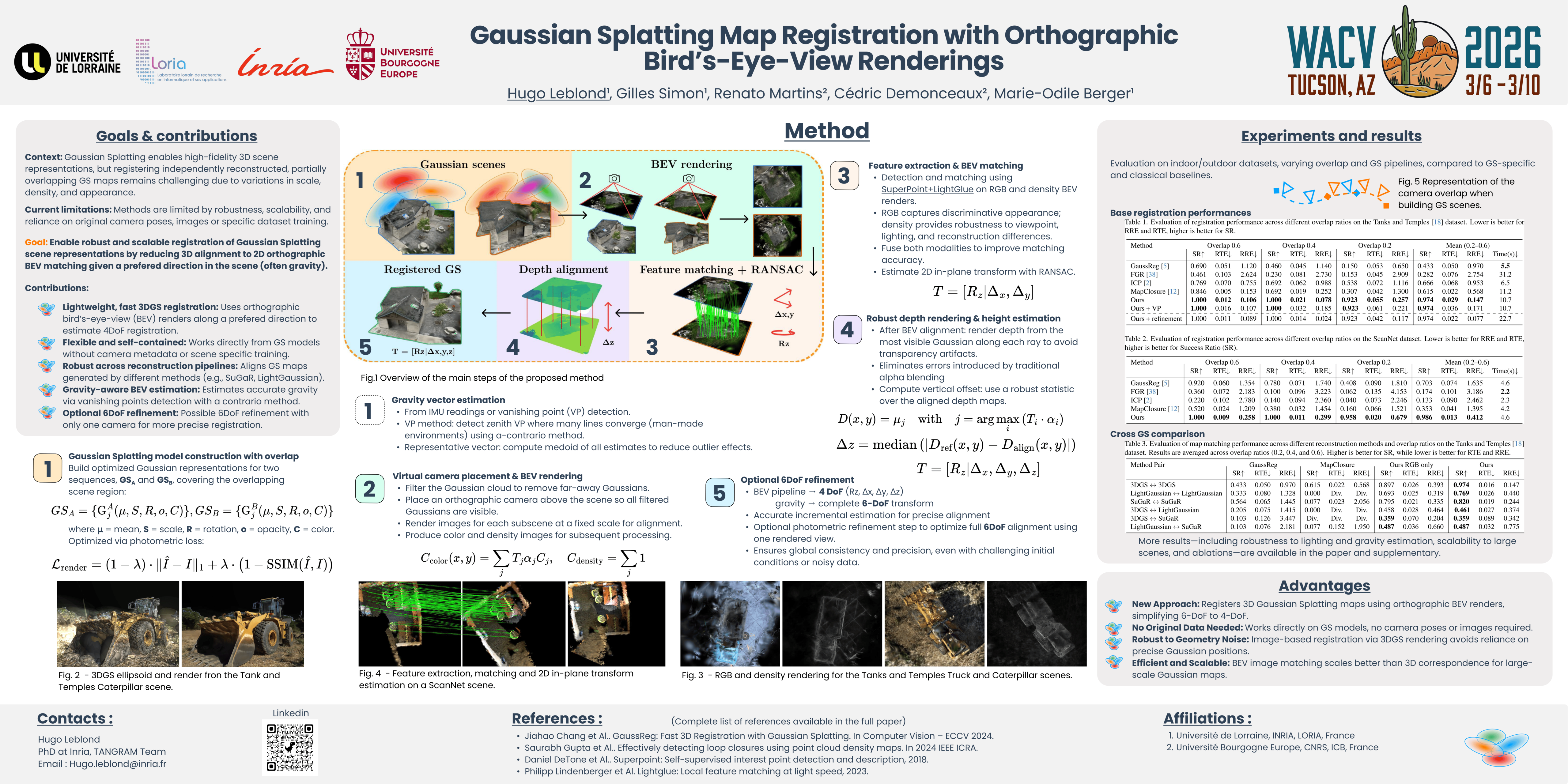
Gaussian Splatting Map Registration with Orthographic Bird's-Eye-View Renderings
{kind=link}
Abstract
Gaussian Splatting (GS) are promising scene representations for visual localization and SLAM. Recent works have explored loop closure detection via Gaussian registration, improving map consistency and accuracy. However, achieving reliable registration given two GS representations from different acquisitions remains challenging.In this paper, we propose a complete pipeline to perform the matching and registration given two GS maps. The proposed method is grounded in generating orthographic bird’s-eye views (BEVs) of optimized Gaussian models. The proposed approach leverages photometric and geometric information extracted directly from the GS to provide a trade-off of accuracy and invariance to different viewing changes (e.g., as type of GS maps, seasons or illumination). Unlike 3D registration methods, which become inefficient as the number of Gaussians grows, our approach leverages 2D orthographic renders thus considerably reducing the registration complexity. Experiments on two public datasets demonstrate that our method achieves higher accuracy than several existing baselines, while also maintaining better registration results when dealing with GS maps learned by different techniques (e.g., 3DGS to LightGaussian), or GS maps presenting viewing changes such as varying illumination conditions. Code and evaluation setup will be made publicly available.