KD360-VoxelBEV: LiDAR and 360-degree Camera Cross Modality Knowledge Distillation for Bird’s-Eye-View Segmentation
{kind=link}
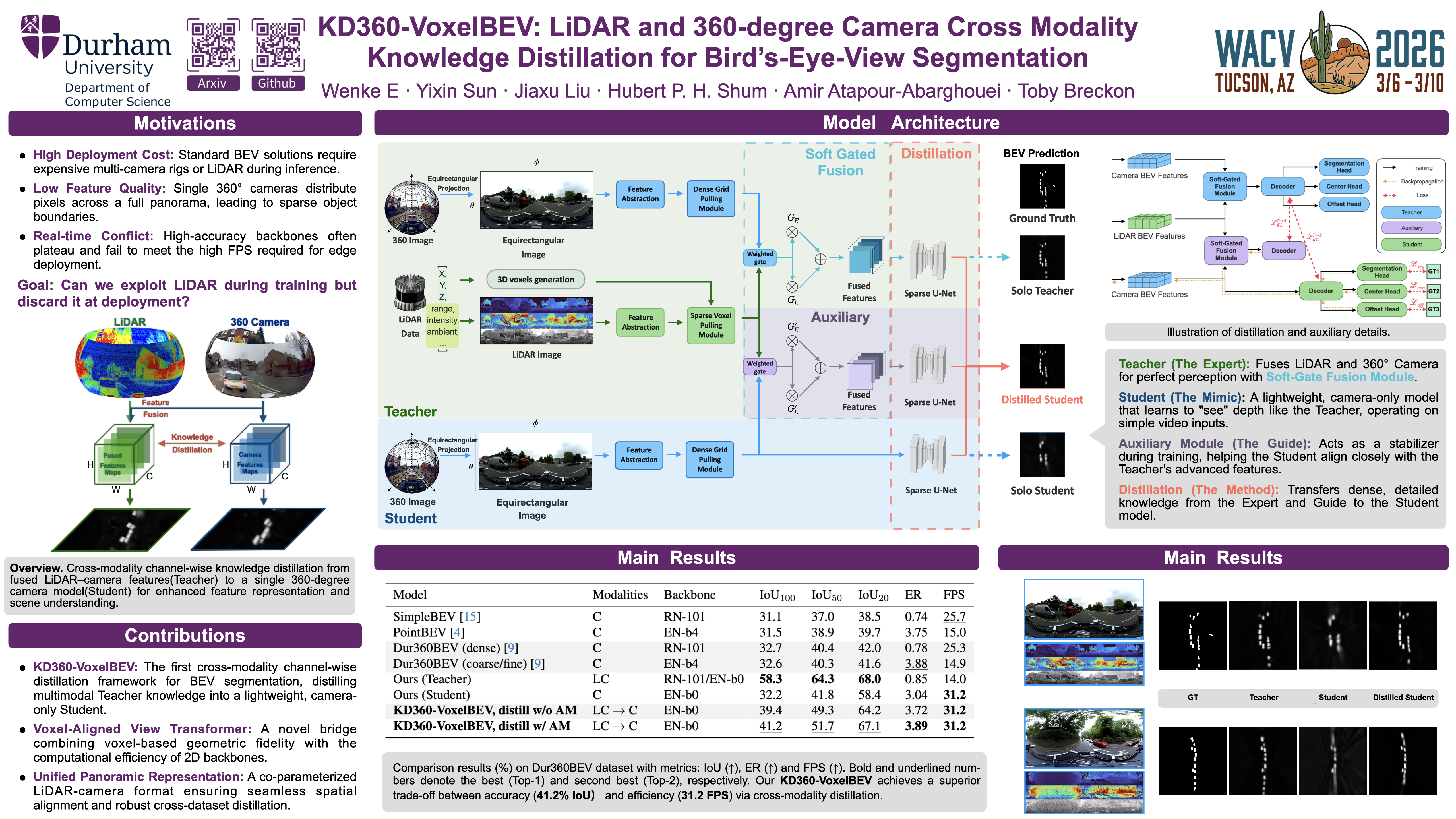
Abstract
We introduce KD360-VoxelBEV, the first architecture that applies cross-modality knowledge distillation to the Bird's-Eye-View (BEV) segmentation task. Our approach leverages a novel LiDAR image representation fused from range, intensity and ambient channels, together with a voxel-aligned view transformer that preserves spatial fidelity while enabling efficient BEV processing. During training, a high-capacity LiDAR and camera fusion teacher network extracts both rich spatial and semantic features for cross-modality knowledge distillation into a lightweight student network that relies solely on a single 360-degree panoramic camera image. Extensive experiments on the Dur360BEV dataset demonstrate that our teacher model significantly outperforms existing camera-based BEV segmentation methods, achieving a 25.6\% IoU improvement. Meanwhile, the distilled student network attains competitive performance with an 8.5\% IoU gain and state-of-the-art inference speed of 31.2 FPS. Moreover, evaluations on KITTI-360 (two fisheye cameras) confirm that our distillation framework generalises to diverse camera setups, underscoring its feasibility and robustness. This approach reduces sensor complexity and deployment costs while providing a practical solution for efficient, low-cost BEV segmentation in real-world autonomous driving.