DOODLE: Diffusion-based Out-of-Distribution Learning for Open-set LiDAR Semantic Segmentation
{kind=link}
Abstract
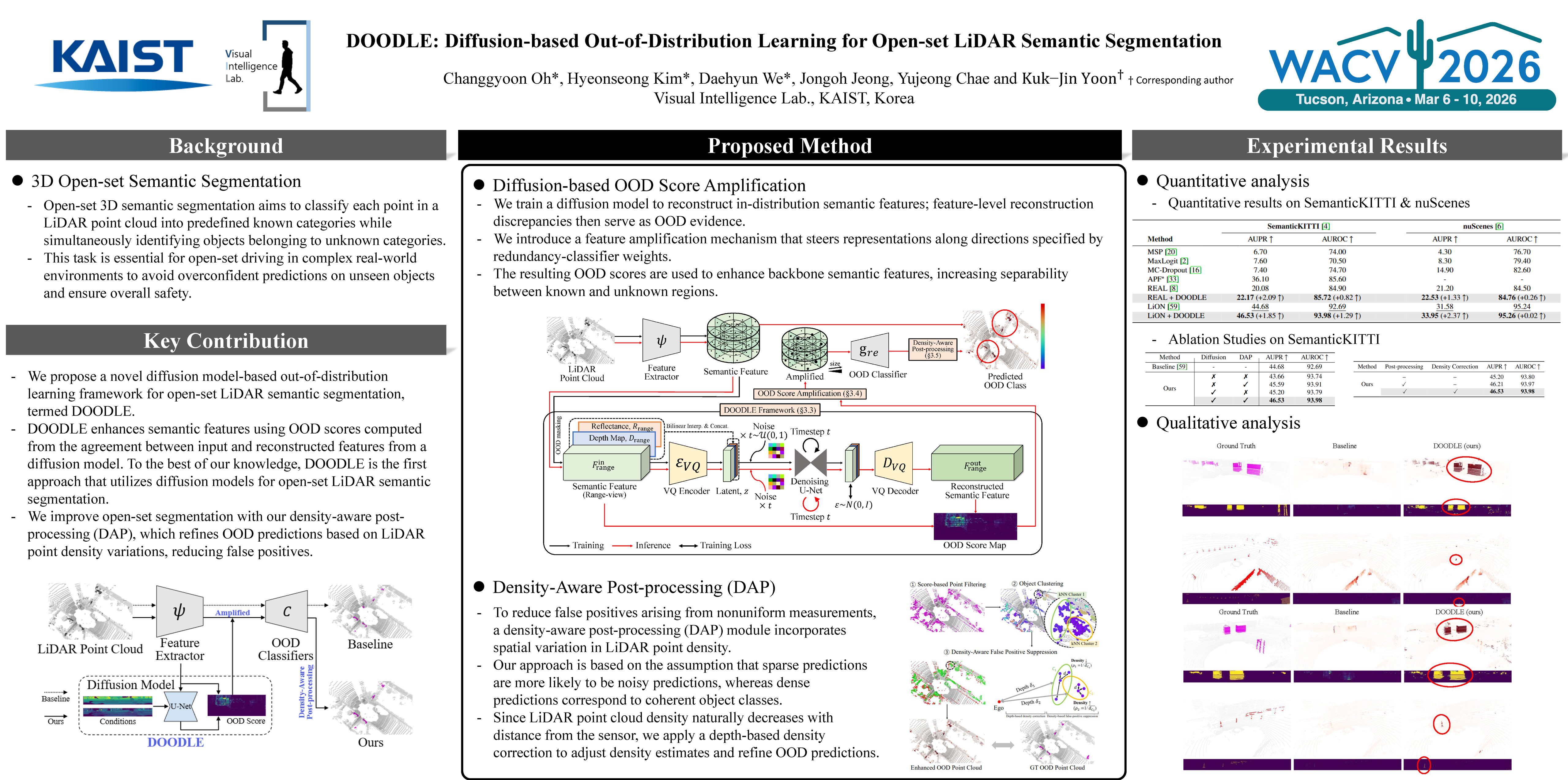
Open-set driving in complex real-world environments requires reliable identification of out-of-distribution (OOD) objects to avoid overconfident predictions on unseen categories. However, the sparsity and limited semantic richness of LiDAR point clouds make separating known and unknown classes difficult. This work proposes DOODLE, a diffusion model–based OOD learning framework for open-set 3D semantic segmentation. DOODLE trains a diffusion model to reconstruct in-distribution semantic features; feature-level reconstruction discrepancies then serve as OOD evidence. The resulting OOD scores are used to enhance backbone semantic features, improving discrimination of unknown regions during segmentation. To further reduce false positives arising from nonuniform measurements, a density-aware post-processing (DAP) module incorporates spatial variation in LiDAR point density when refining OOD predictions. DOODLE integrates seamlessly with existing open-set models and does not constrain backbone design. Experiments on SemanticKITTI and nuScenes demonstrate state-of-the-art OOD performance. On SemanticKITTI, DOODLE improves area under the precision–recall curve (AUPR) by 1.85%p and area under the receiver operating characteristic (AUROC) by 1.29%p over prior methods. Ablation studies confirm complementary benefits from diffusion-based reconstruction and DAP. Code will be open for reproducibility.