UnderWater SLAM with Laser-light sectioning method using ST-GAT
{kind=link}
Abstract
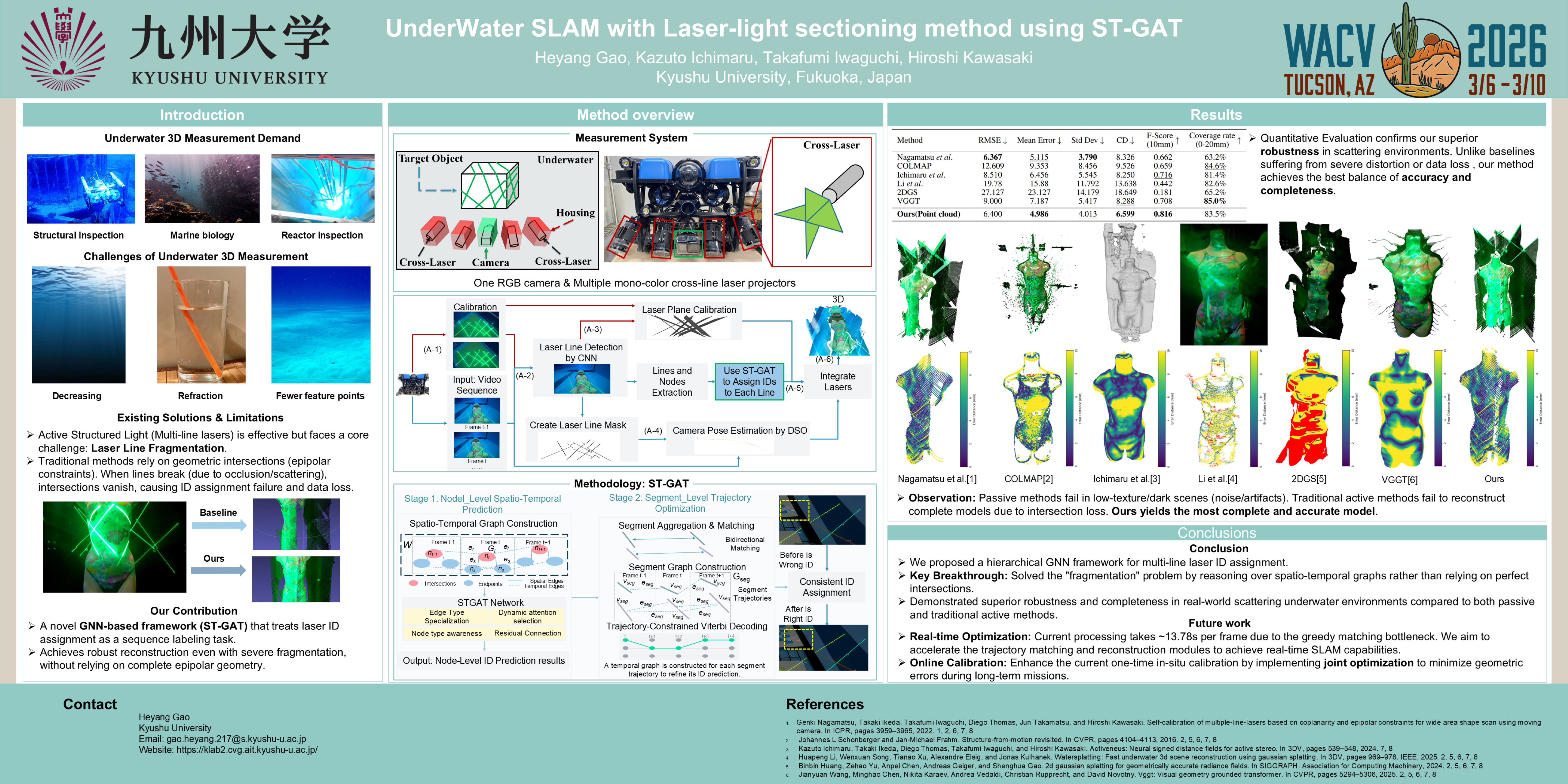
Multi-line laser ID assignment is crucial for underwater 3D reconstruction but fails when lines fragment. We reformulate this as a graph-based sequence labeling task and propose a novel two-stage hierarchical framework using Spatio-Temporal Graph Attention Networks (ST-GAT). Our method first reasons over a spatio-temporal graph of laser endpoints and intersections to handle local fragmentation, then elevates this to a global segment-level optimization with trajectory-constrained Viterbi decoding to ensure temporal consistency. This GNN-based approach eliminates the reliance on complete epipolar geometry. Experiments on real underwater datasets demonstrate superior reconstruction completeness and temporal stability, especially in challenging environments where traditional methods fail.