Latent Uncertainty-Aware Multi-View SDF Scan Completion
{kind=link}
Abstract
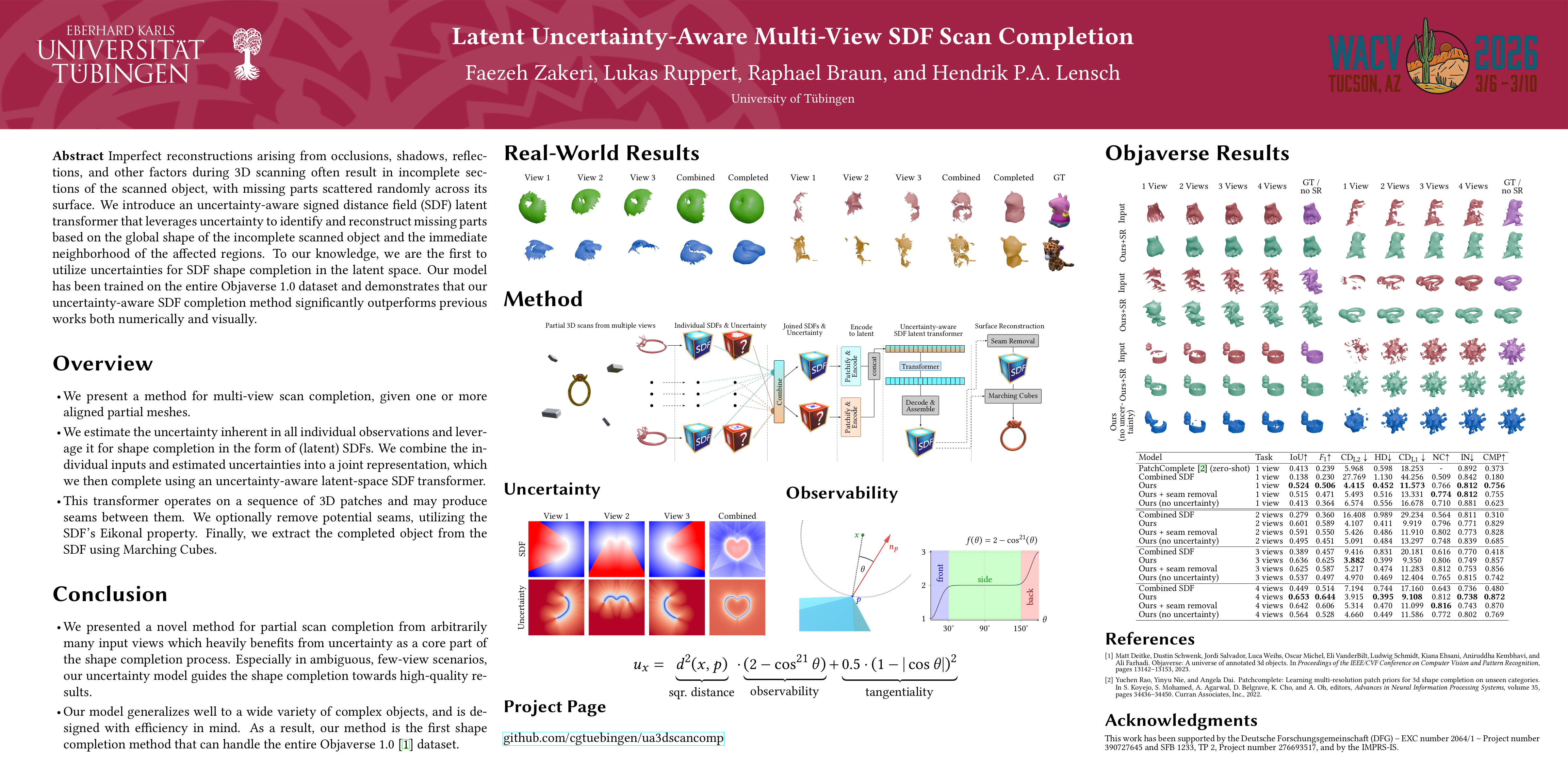
Imperfect reconstructions arising from occlusions, shadows, reflections, and other factors during 3D scanningoften result in incomplete sections of the scanned object,with missing parts scattered randomly across its surface.We introduce an uncertainty-aware signed distance field (SDF) latent transformerthat leverages uncertainty to identify and reconstruct missing parts based on the global shape of the incomplete scanned objectand the immediate neighborhood of the affected regions.To our knowledge, we are the first to utilize uncertainties for SDF shape completion in the latent space.Our model has been trained on the entire Objaverse 1.0 datasetand demonstrates that our uncertainty-aware SDF completion method significantlyoutperforms previous works both numerically and visually.