QC-SF: Improving Computer Vision for Airborne LiDAR Point Clouds of Boreal Forests with Quebec Simulated Forest Dataset
{kind=link}
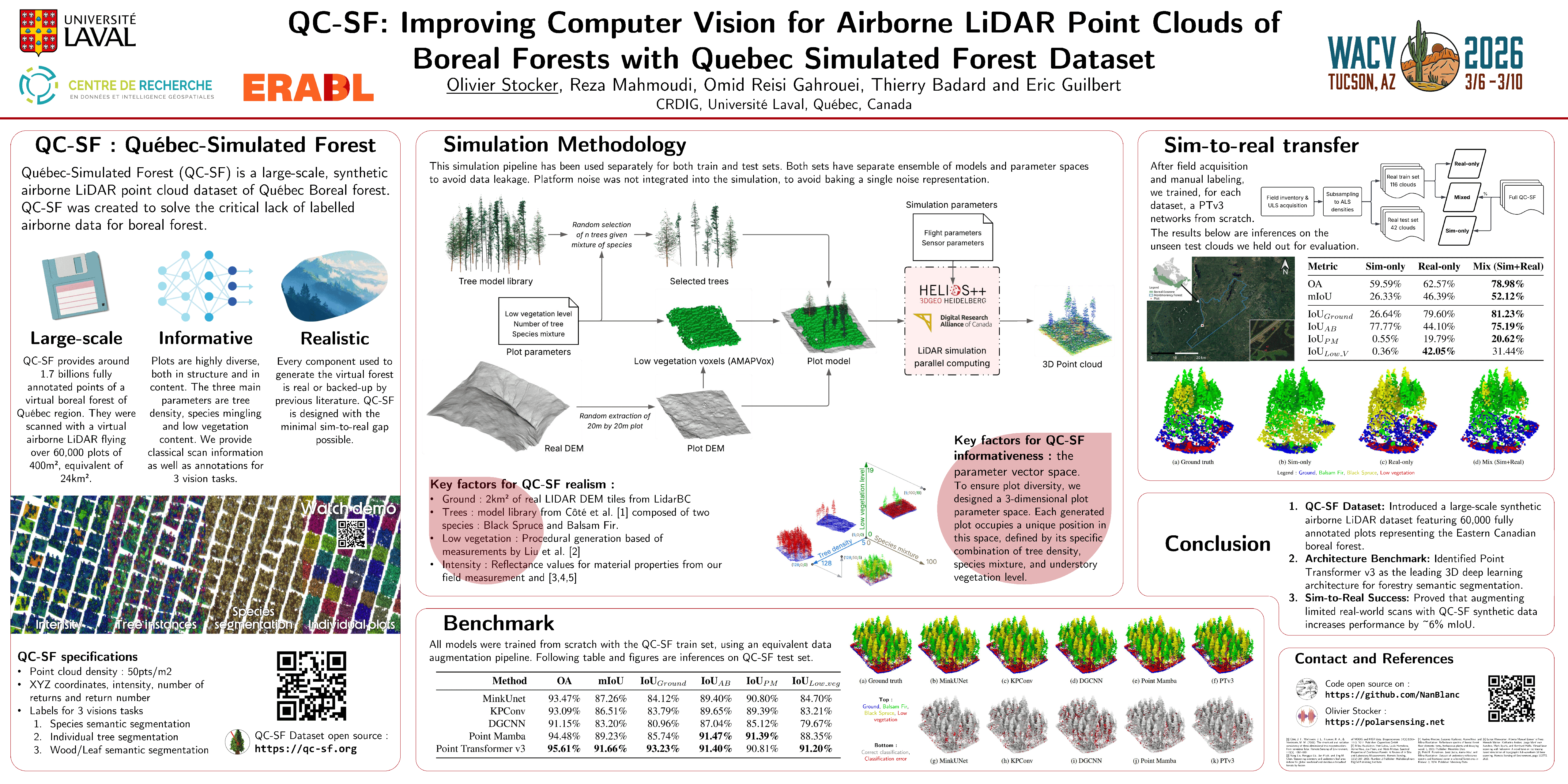
Abstract
Boreal forest ecosystems are under immense pressure, and while airborne LiDAR has emerged as a powerful monitoring tool, leveraging its large data volumes requires automated analysis. Deep learning methods offer a solution but are hindered by the scarcity of large-scale, labeled datasets in forestry, contrasting to the data-rich urban environments.To address this gap, we introduce the Quebec Boreal Sim (QC-BS), a large-scale, synthetic airborne LiDAR dataset fully labeled for semantic segmentation. QC-BS contains 60,000 forest plots, each composed of a controlled mixture of two dominant species in Quebec's boreal forest: Black Spruce and Balsam Fir. Using this benchmark, we evaluate the performance of four state-of-the-art point cloud networks: KPConv, MinkUNet, DGCNN, and Point Transformer V3.Our results identify Point Transformer V3 as the most effective architecture, achieving 91.66\% mIoU. Furthermore, we validate the sim-to-real transferability of our dataset, demonstrating that augmenting a small number of real-world scans with our synthetic data improves segmentation performance by 6\% in mIoU score. [Our dataset will be made publicly available upon acceptance].