Generalized Category Discovery for LiDAR Semantic Segmentation
{kind=link}
Abstract
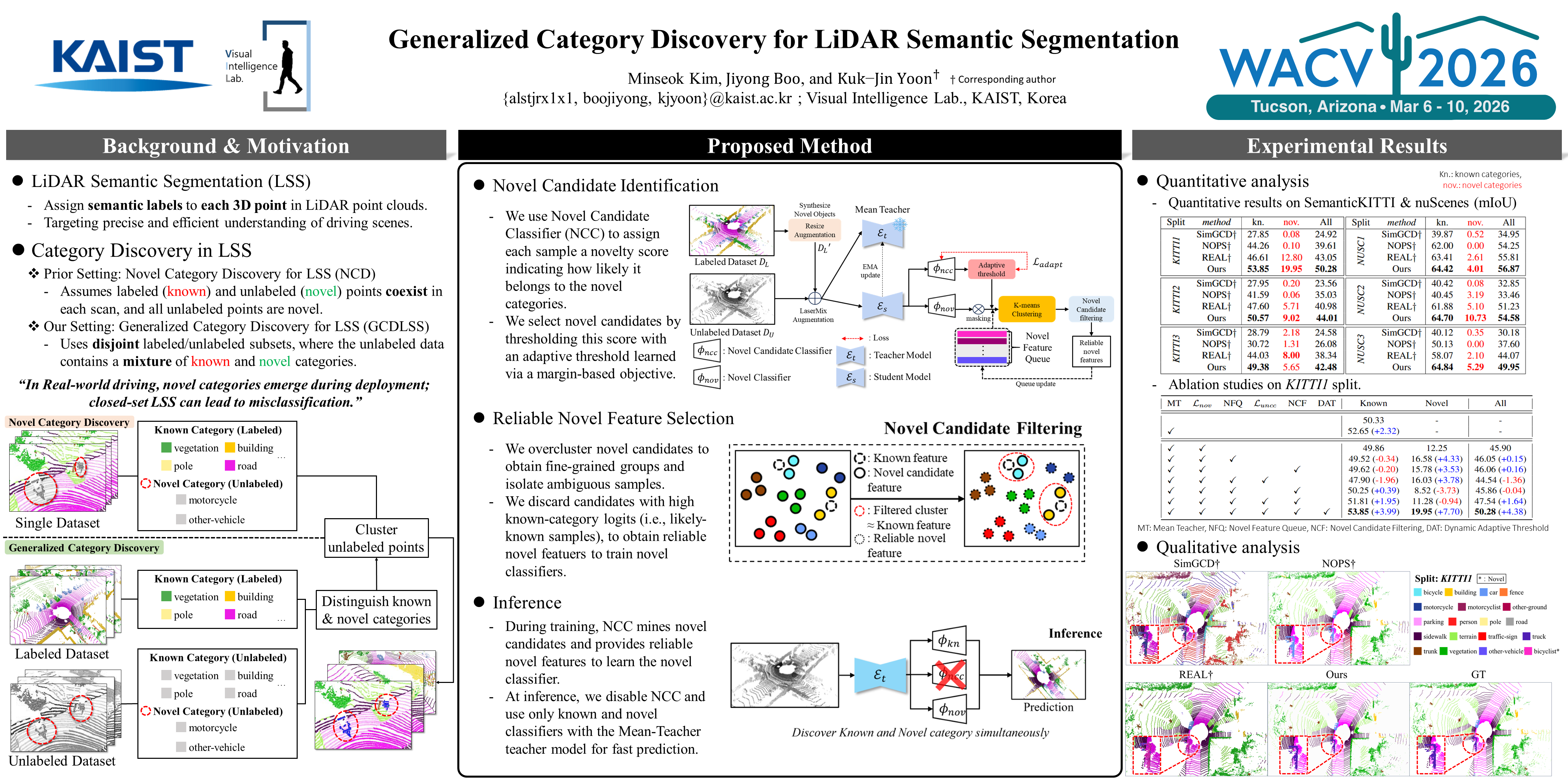
Novel Category Discovery (NCD) methods for LiDAR Semantic Segmentation (LSS) assume that labeled and unlabeled points coexist in every scan and that all unlabeled points belong solely to novel categories. We formalize this into a more practical task, Generalized Category Discovery for LSS (GCDLSS), in which the labeled and unlabeled subsets are disjoint and the unlabeled data contain a mixture of known and novel categories. Existing 2D GCD methods fail under this setting, struggling to distinguish the two groups in sparse, imbalanced LiDAR data. To address this limitation, we present a unified framework that (i) employs a learnable adaptive threshold to obtain point-wise anomaly scores to capture candidates, (ii) refines these candidates through a clustering-based filtering mechanism, and (iii) stabilizes training with a novel-feature queue that supplies reliable novel features even when a scene lacks novel categories. This explicit modeling of novel categories preserves segmentation quality for known classes while markedly improving discovery performance—a direction not explored in prior GCD or NCD methods. Extensive experiments on SemanticKITTI and nuScenes demonstrate that our approach consistently surpasses adapted baselines, establishing a strong benchmark for future work in open-world LSS.